پریسجن سروو ڈی سی موٹر 46S/185-8A

سروو ڈی سی موٹر کی بنیادی خصوصیات: (دیگر ماڈلز، کارکردگی کو اپنی مرضی کے مطابق کیا جا سکتا ہے)
| 1. شرح شدہ وولٹیج: | DC 7.4V | 5. شرح شدہ رفتار: | ≥ 2600 rpm |
| 2. آپریٹنگ وولٹیج کی حد: | DC 7.4V-13V | 6. کرنٹ کو مسدود کرنا: | ≤2.5A |
| 3. شرح شدہ طاقت: | 25W | 7. موجودہ لوڈ کریں: | ≥1A |
| 4. گردش کی سمت: | CW آؤٹ پٹ شافٹ اوپر ہے۔ | 8. شافٹ کلیئرنس: | ≤1.0 ملی میٹر |
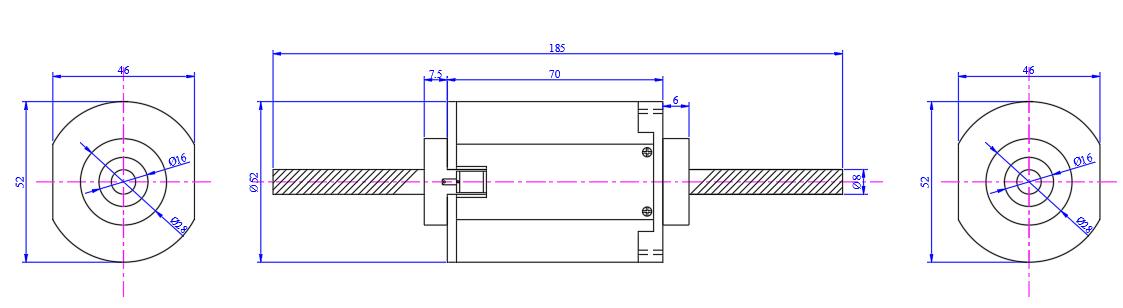
مصنوعات کی ظاہری شکل کا خاکہ
میعاد ختم ہونے کا وقت
پیداوار کی تاریخ سے، مصنوعات کے محفوظ استعمال کی مدت 10 سال ہے، اور مسلسل کام کرنے کا وقت ≥ 2000 گھنٹے ہے.
مصنوعات کی خصوصیات
1. کمپیکٹ، خلائی بچت ڈیزائن؛
2. بال بیئرنگ ڈھانچہ؛
3. برش کی طویل سروس کی زندگی؛
4. برش تک بیرونی رسائی موٹر لائف کو مزید بڑھانے کے لیے آسان متبادل کی اجازت دیتی ہے۔
5. ہائی سٹارٹنگ torque؛
6. تیزی سے روکنے کے لیے متحرک بریک لگانا؛
7. ریورسبل گردش؛
8. سادہ دو تار کنکشن؛
9.Class F موصلیت، اعلی درجہ حرارت ویلڈنگ کمیوٹیٹر۔
10. اعلی کارکردگی، اعلی قیمت کی کارکردگی اور کم مداخلت.
ایپلی کیشنز
یہ سمارٹ ہوم، صحت سے متعلق طبی آلات، آٹوموبائل ڈرائیو، کنزیومر الیکٹرانکس مصنوعات، مساج اور صحت کی دیکھ بھال کا سامان، ذاتی نگہداشت کے اوزار، ذہین روبوٹ ٹرانسمیشن، صنعتی آٹومیشن، خودکار مکینیکل آلات، ڈیجیٹل مصنوعات وغیرہ کے شعبوں میں بڑے پیمانے پر استعمال ہوتا ہے۔
کارکردگی کی مثال



سروو سسٹم: یہ ایک خودکار کنٹرول سسٹم ہے جو آؤٹ پٹ کنٹرول شدہ مقداروں کو قابل بناتا ہے جیسے کسی چیز کی پوزیشن، واقفیت، اور حالت کو ان پٹ ہدف (یا دی گئی قدر) میں کسی بھی تبدیلی کی پیروی کرنے کے لیے۔ سروو کا بنیادی کام کنٹرول کمانڈ کی ضروریات کے مطابق طاقت کو بڑھانا، تبدیل کرنا اور ریگولیٹ کرنا ہے، تاکہ ڈرائیو ڈیوائس کے ذریعے ٹارک، رفتار اور پوزیشن آؤٹ پٹ کو بہت لچکدار اور آسانی سے کنٹرول کیا جا سکے۔
اس کی "سرو" کارکردگی کی وجہ سے اسے سروو موٹر کا نام دیا گیا ہے۔ اس کا کام ان پٹ وولٹیج کنٹرول سگنل کو آؤٹ پٹ کونیی نقل مکانی اور شافٹ پر کونیی رفتار کو کنٹرول آبجیکٹ کو چلانے کے لیے تبدیل کرنا ہے۔
ڈی سی سروو موٹر کا اصول
ڈی سی سروو موٹر کا کام کرنے کا اصول بنیادی طور پر عام ڈی سی موٹر جیسا ہی ہے۔ الیکٹرو میگنیٹک ٹارک آرمیچر ایئر فلو اور ایئر گیپ میگنیٹک فلوکس کے عمل سے پیدا ہوتا ہے تاکہ سرو موٹر کو گھوم سکے۔ عام طور پر، آرمیچر کنٹرول کا طریقہ استعمال کیا جاتا ہے تاکہ وولٹیج کو تبدیل کر کے رفتار کو تبدیل کیا جا سکے جبکہ ایکسائٹیشن وولٹیج کو مستقل رکھا جائے۔ وولٹیج جتنا چھوٹا ہوگا، رفتار اتنی ہی کم ہوگی، اور جب وولٹیج صفر ہوجائے تو یہ گھومنا بند کردیتا ہے۔ کیونکہ جب وولٹیج صفر ہوتا ہے تو کرنٹ بھی صفر ہوتا ہے، لہٰذا موٹر برقی مقناطیسی ٹارک پیدا نہیں کرے گی اور نہ ہی خود گردش کا رجحان ظاہر ہوگا۔







